


排序算法是《數(shù)據(jù)結(jié)構(gòu)與算法》中最基本的算法之一。本文介紹10種常見的內(nèi)部排序算法,及如何用Python實(shí)現(xiàn)。
排序算法可以分為內(nèi)部排序和外部排序,內(nèi)部排序是數(shù)據(jù)記錄在內(nèi)存中進(jìn)行排序,而外部排序是因排序的數(shù)據(jù)很大,一次不能容納全部的排序記錄,在排序過(guò)程中需要訪問(wèn)外存。
常見的內(nèi)部排序算法有:插入排序、希爾排序、選擇排序、冒泡排序、歸并排序、快速排序、堆排序、基數(shù)排序等。
用一張圖概括:
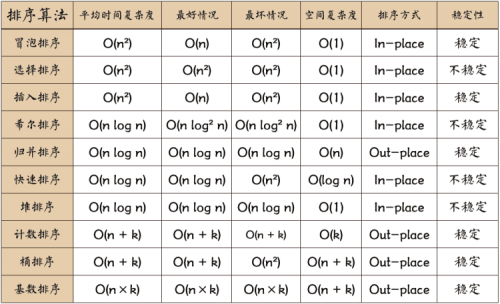
關(guān)于時(shí)間復(fù)雜度:
●平方階 (O(n2)) 排序:各類簡(jiǎn)單排序,直接插入、直接選擇和冒泡排序;
●線性對(duì)數(shù)階 (O(nlog2n)) 排序:快速排序、堆排序和歸并排序;
●希爾排序:O(n1+§)) 排序,§ 是介于 0 和 1 之間的常數(shù);
●線性階 (O(n)) 排序:基數(shù)排序,此外還有桶、箱排序。
關(guān)于穩(wěn)定性:
●排序后 2 個(gè)相等鍵值的順序和排序之前它們的順序相同。
●穩(wěn)定的排序算法:冒泡排序、插入排序、歸并排序和基數(shù)排序。
●不是穩(wěn)定的排序算法:選擇排序、快速排序、希爾排序、堆排序。
名詞解釋:
●n:數(shù)據(jù)規(guī)模。
●k:“桶”的個(gè)數(shù)。
●In-place:占用常數(shù)內(nèi)存,不占用額外內(nèi)存。
●Out-place:占用額外內(nèi)存。
冒泡排序
冒泡排序(Bubble Sort)也是一種簡(jiǎn)單直觀的排序算法。它重復(fù)地走訪過(guò)要排序的數(shù)列,一次比較兩個(gè)元素,如果他們的順序錯(cuò)誤就把他們交換過(guò)來(lái)。走訪數(shù)列的工作是重復(fù)地進(jìn)行直到?jīng)]有再需要交換,也就是說(shuō)該數(shù)列已經(jīng)排序完成。這個(gè)算法的名字由來(lái)是因?yàn)樵叫〉脑貢?huì)經(jīng)由交換慢慢“浮”到數(shù)列的頂端。
作為最簡(jiǎn)單的排序算法之一,冒泡排序給我的感覺(jué)就像 Abandon 在單詞書里出現(xiàn)的感覺(jué)一樣,每次都在第一頁(yè)第一位,所以最熟悉。冒泡排序還有一種優(yōu)化算法,就是立一個(gè) flag,當(dāng)在一趟序列遍歷中元素沒(méi)有發(fā)生交換,則證明該序列已經(jīng)有序。但這種改進(jìn)對(duì)于提升性能來(lái)說(shuō)并沒(méi)有什么太大作用。
1.算法步驟
●比較相鄰的元素。如果第一個(gè)比第二個(gè)大,就交換他們兩個(gè)。
●對(duì)每一對(duì)相鄰元素作同樣的工作,從開始第一對(duì)到結(jié)尾的最后一對(duì)。這步做完后,最后的元素會(huì)是最大的數(shù)。
●針對(duì)所有的元素重復(fù)以上的步驟,除了最后一個(gè)。
●持續(xù)每次對(duì)越來(lái)越少的元素重復(fù)上面的步驟,直到?jīng)]有任何一對(duì)數(shù)字需要比較。
2.Python 代碼
def bubbleSort(arr):
for i in range(1, len(arr)):
for j in range(0, len(arr)-i):
if arr[j] > arr[j+1]:
arr[j], arr[j + 1] = arr[j + 1], arr[j]
return arr
選擇排序
選擇排序是一種簡(jiǎn)單直觀的排序算法,無(wú)論什么數(shù)據(jù)進(jìn)去都是 O(n²) 的時(shí)間復(fù)雜度。所以用到它的時(shí)候,數(shù)據(jù)規(guī)模越小越好。唯一的好處可能就是不占用額外的內(nèi)存空間了吧。
1.算法步驟
●首先在未排序序列中找到最小(大)元素,存放到排序序列的起始位置。
●再?gòu)氖S辔磁判蛟刂欣^續(xù)尋找最小(大)元素,然后放到已排序序列的末尾。
●重復(fù)第二步,直到所有元素均排序完畢。
2.Python 代碼
def selectionSort(arr):
for i in range(len(arr) - 1):
# 記錄最小數(shù)的索引
minIndex = i
for j in range(i + 1, len(arr)):
if arr[j] < arr[minIndex]:
minIndex = j
# i 不是最小數(shù)時(shí),將 i 和最小數(shù)進(jìn)行交換
if i != minIndex:
arr[i], arr[minIndex] = arr[minIndex], arr[i]
return arr
插入排序
插入排序的代碼實(shí)現(xiàn)雖然沒(méi)有冒泡排序和選擇排序那么簡(jiǎn)單粗暴,但它的原理應(yīng)該是最容易理解的了,因?yàn)橹灰蜻^(guò)撲克牌的人都應(yīng)該能夠秒懂。插入排序是一種最簡(jiǎn)單直觀的排序算法,它的工作原理是通過(guò)構(gòu)建有序序列,對(duì)于未排序數(shù)據(jù),在已排序序列中從后向前掃描,找到相應(yīng)位置并插入。
插入排序和冒泡排序一樣,也有一種優(yōu)化算法,叫做拆半插入。
1.算法步驟
●將第一待排序序列第一個(gè)元素看做一個(gè)有序序列,把第二個(gè)元素到最后一個(gè)元素當(dāng)成是未排序序列。
●從頭到尾依次掃描未排序序列,將掃描到的每個(gè)元素插入有序序列的適當(dāng)位置。(如果待插入的元素與有序序列中的某個(gè)元素相等,則將待插入元素插入到相等元素的后面。)
2.Python 代碼
def insertionSort(arr):
for i in range(len(arr)):
preIndex = i-1
current = arr[i]
while preIndex >= 0 and arr[preIndex] > current:
arr[preIndex+1] = arr[preIndex]
preIndex-=1
arr[preIndex+1] = current
return arr
希爾排序
希爾排序,也稱遞減增量排序算法,是插入排序的一種更高效的改進(jìn)版本。但希爾排序是非穩(wěn)定排序算法。
希爾排序是基于插入排序的以下兩點(diǎn)性質(zhì)而提出改進(jìn)方法的:
●插入排序在對(duì)幾乎已經(jīng)排好序的數(shù)據(jù)操作時(shí),效率高,即可以達(dá)到線性排序的效率;
●但插入排序一般來(lái)說(shuō)是低效的,因?yàn)椴迦肱判蛎看沃荒軐?shù)據(jù)移動(dòng)一位。
希爾排序的基本思想是:先將整個(gè)待排序的記錄序列分割成為若干子序列分別進(jìn)行直接插入排序,待整個(gè)序列中的記錄“基本有序”時(shí),再對(duì)全體記錄進(jìn)行依次直接插入排序。
1.算法步驟
●選擇一個(gè)增量序列 t1,t2,……,tk,其中 ti > tj, tk = 1;
●按增量序列個(gè)數(shù) k,對(duì)序列進(jìn)行 k 趟排序;
●每趟排序,根據(jù)對(duì)應(yīng)的增量 ti,將待排序列分割成若干長(zhǎng)度為 m 的子序列,分別對(duì)各子表進(jìn)行直接插入排序。僅增量因子為 1 時(shí),整個(gè)序列作為一個(gè)表來(lái)處理,表長(zhǎng)度即為整個(gè)序列的長(zhǎng)度。
2.Python 代碼
def shellSort(arr):
import math
gap=1
while(gap < len(arr)/3):
gap = gap*3+1
while gap > 0:
for i in range(gap,len(arr)):
temp = arr[i]
j = i-gap
while j >=0 and arr[j] > temp:
arr[j+gap]=arr[j]
j-=gap
arr[j+gap] = temp
gap = math.floor(gap/3)
return arr
}
歸并排序
歸并排序(Merge sort)是建立在歸并操作上的一種有效的排序算法。該算法是采用分治法(Divide and Conquer)的一個(gè)非常典型的應(yīng)用。
作為一種典型的分而治之思想的算法應(yīng)用,歸并排序的實(shí)現(xiàn)由兩種方法:
●自上而下的遞歸(所有遞歸的方法都可以用迭代重寫,所以就有了第 2 種方法);
●自下而上的迭代。
和選擇排序一樣,歸并排序的性能不受輸入數(shù)據(jù)的影響,但表現(xiàn)比選擇排序好的多,因?yàn)槭冀K都是 O(nlogn) 的時(shí)間復(fù)雜度。代價(jià)是需要額外的內(nèi)存空間。
1.算法步驟
●申請(qǐng)空間,使其大小為兩個(gè)已經(jīng)排序序列之和,該空間用來(lái)存放合并后的序列;
●設(shè)定兩個(gè)指針,最初位置分別為兩個(gè)已經(jīng)排序序列的起始位置;
●比較兩個(gè)指針?biāo)赶虻脑兀x擇相對(duì)小的元素放入到合并空間,并移動(dòng)指針到下一位置;
●重復(fù)步驟 3 直到某一指針達(dá)到序列尾;
●將另一序列剩下的所有元素直接復(fù)制到合并序列尾。
2.Python 代碼
def mergeSort(arr):
import math
if(len(arr)<2):
return arr
middle = math.floor(len(arr)/2)
left, right = arr[0:middle], arr[middle:]
return merge(mergeSort(left), mergeSort(right))
def merge(left,right):
result = []
while left and right:
if left[0] <= right[0]:
result.append(left.pop(0));
else:
result.append(right.pop(0));
while left:
result.append(left.pop(0));
while right:
result.append(right.pop(0));
return result
快速排序
快速排序是由東尼·霍爾所發(fā)展的一種排序算法。在平均狀況下,排序 n 個(gè)項(xiàng)目要 Ο(nlogn) 次比較。在最壞狀況下則需要 Ο(n2) 次比較,但這種狀況并不常見。事實(shí)上,快速排序通常明顯比其他 Ο(nlogn) 算法更快,因?yàn)樗膬?nèi)部循環(huán)(inner loop)可以在大部分的架構(gòu)上很有效率地被實(shí)現(xiàn)出來(lái)。
快速排序使用分治法(Divide and conquer)策略來(lái)把一個(gè)串行(list)分為兩個(gè)子串行(sub-lists)。
快速排序又是一種分而治之思想在排序算法上的典型應(yīng)用。本質(zhì)上來(lái)看,快速排序應(yīng)該算是在冒泡排序基礎(chǔ)上的遞歸分治法。
快速排序的名字起的是簡(jiǎn)單粗暴,因?yàn)橐宦牭竭@個(gè)名字你就知道它存在的意義,就是快,而且效率高!它是處理大數(shù)據(jù)最快的排序算法之一了。
雖然 Worst Case 的時(shí)間復(fù)雜度達(dá)到了 O(n²),但是人家就是優(yōu)秀,在大多數(shù)情況下都比平均時(shí)間復(fù)雜度為 O(n logn) 的排序算法表現(xiàn)要更好,可是這是為什么呢,我也不知道。好在我的強(qiáng)迫癥又犯了,查了 N 多資料終于在《算法藝術(shù)與信息學(xué)競(jìng)賽》上找到了滿意的答案:
快速排序的最壞運(yùn)行情況是 O(n²),比如說(shuō)順序數(shù)列的快排。但它的平攤期望時(shí)間是 O(nlogn),且 O(nlogn) 記號(hào)中隱含的常數(shù)因子很小,比復(fù)雜度穩(wěn)定等于 O(nlogn) 的歸并排序要小很多。所以,對(duì)絕大多數(shù)順序性較弱的隨機(jī)數(shù)列而言,快速排序總是優(yōu)于歸并排序。
1.算法步驟
●從數(shù)列中挑出一個(gè)元素,稱為 “基準(zhǔn)”(pivot);
●重新排序數(shù)列,所有元素比基準(zhǔn)值小的擺放在基準(zhǔn)前面,所有元素比基準(zhǔn)值大的擺在基準(zhǔn)的后面(相同的數(shù)可以到任一邊)。在這個(gè)分區(qū)退出之后,該基準(zhǔn)就處于數(shù)列的中間位置。這個(gè)稱為分區(qū)(partition)操作;
●遞歸地(recursive)把小于基準(zhǔn)值元素的子數(shù)列和大于基準(zhǔn)值元素的子數(shù)列排序。
遞歸的最底部情形,是數(shù)列的大小是零或一,也就是永遠(yuǎn)都已經(jīng)被排序好了。雖然一直遞歸下去,但是這個(gè)算法總會(huì)退出,因?yàn)樵诿看蔚牡?iteration)中,它至少會(huì)把一個(gè)元素?cái)[到它最后的位置去。
2.Python 代碼
def quickSort(arr, left=None, right=None):
left = 0 if not isinstance(left,(int, float)) else left
right = len(arr)-1 if not isinstance(right,(int, float)) else right
if left < right:
partitionIndex = partition(arr, left, right)
quickSort(arr, left, partitionIndex-1)
quickSort(arr, partitionIndex+1, right)
return arr
def partition(arr, left, right):
pivot = left
index = pivot+1
i = index
while i <= right:
if arr[i] < arr[pivot]:
swap(arr, i, index)
index+=1
i+=1
swap(arr,pivot,index-1)
return index-1
def swap(arr, i, j):
arr[i], arr[j] = arr[j], arr[i]
堆排序
堆排序(Heapsort)是指利用堆這種數(shù)據(jù)結(jié)構(gòu)所設(shè)計(jì)的一種排序算法。堆積是一個(gè)近似完全二叉樹的結(jié)構(gòu),并同時(shí)滿足堆積的性質(zhì):即子結(jié)點(diǎn)的鍵值或索引總是小于(或者大于)它的父節(jié)點(diǎn)。堆排序可以說(shuō)是一種利用堆的概念來(lái)排序的選擇排序。分為兩種方法:
●大頂堆:每個(gè)節(jié)點(diǎn)的值都大于或等于其子節(jié)點(diǎn)的值,在堆排序算法中用于升序排列;
●小頂堆:每個(gè)節(jié)點(diǎn)的值都小于或等于其子節(jié)點(diǎn)的值,在堆排序算法中用于降序排列。
堆排序的平均時(shí)間復(fù)雜度為 Ο(nlogn)。
1.算法步驟
●創(chuàng)建一個(gè)堆 H[0……n-1];
●把堆首(最大值)和堆尾互換;
●把堆的尺寸縮小 1,并調(diào)用 shift_down(0),目的是把新的數(shù)組頂端數(shù)據(jù)調(diào)整到相應(yīng)位置;
●重復(fù)步驟 2,直到堆的尺寸為 1。
2.Python 代碼
def buildMaxHeap(arr):
import math
for i in range(math.floor(len(arr)/2),-1,-1):
heapify(arr,i)
def heapify(arr, i):
left = 2*i+1
right = 2*i+2
largest = i
if left < arrLen and arr[left] > arr[largest]:
largest = left
if right < arrLen and arr[right] > arr[largest]:
largest = right
if largest != i:
swap(arr, i, largest)
heapify(arr, largest)
def swap(arr, i, j):
arr[i], arr[j] = arr[j], arr[i]
計(jì)數(shù)排序
計(jì)數(shù)排序的核心在于將輸入的數(shù)據(jù)值轉(zhuǎn)化為鍵存儲(chǔ)在額外開辟的數(shù)組空間中。作為一種線性時(shí)間復(fù)雜度的排序,計(jì)數(shù)排序要求輸入的數(shù)據(jù)必須是有確定范圍的整數(shù)。
1.Python 代碼
def countingSort(arr, maxValue):
bucketLen = maxValue+1
bucket = [0]*bucketLen
sortedIndex =0
arrLen = len(arr)
for i in range(arrLen):
if not bucket[arr[i]]:
bucket[arr[i]]=0
bucket[arr[i]]+=1
for j in range(bucketLen):
while bucket[j]>0:
arr[sortedIndex] = j
sortedIndex+=1
bucket[j]-=1
return arr
桶排序
桶排序是計(jì)數(shù)排序的升級(jí)版。它利用了函數(shù)的映射關(guān)系,高效與否的關(guān)鍵就在于這個(gè)映射函數(shù)的確定。為了使桶排序更加高效,我們需要做到這兩點(diǎn):
●在額外空間充足的情況下,盡量增大桶的數(shù)量。
●使用的映射函數(shù)能夠?qū)⑤斎氲?N 個(gè)數(shù)據(jù)均勻的分配到 K 個(gè)桶中。
同時(shí),對(duì)于桶中元素的排序,選擇何種比較排序算法對(duì)于性能的影響至關(guān)重要。
什么時(shí)候最快
當(dāng)輸入的數(shù)據(jù)可以均勻的分配到每一個(gè)桶中。
什么時(shí)候最慢
當(dāng)輸入的數(shù)據(jù)被分配到了同一個(gè)桶中。
Python 代碼
def bucket_sort(s):
"""桶排序"""
min_num = min(s)
max_num = max(s)
# 桶的大小
bucket_range = (max_num-min_num) / len(s)
# 桶數(shù)組
count_list = [ [] for i in range(len(s) + 1)]
# 向桶數(shù)組填數(shù)
for i in s:
count_list[int((i-min_num)//bucket_range)].append(i)
s.clear()
# 回填,這里桶內(nèi)部排序直接調(diào)用了sorted
for i in count_list:
for j in sorted(i):
s.append(j)
if __name__ == __main__ :
a = [3.2,6,8,4,2,6,7,3]
bucket_sort(a)
print(a) # [2, 3, 3.2, 4, 6, 6, 7, 8]
基數(shù)排序
基數(shù)排序是一種非比較型整數(shù)排序算法,其原理是將整數(shù)按位數(shù)切割成不同的數(shù)字,然后按每個(gè)位數(shù)分別比較。由于整數(shù)也可以表達(dá)字符串(比如名字或日期)和特定格式的浮點(diǎn)數(shù),所以基數(shù)排序也不是只能使用于整數(shù)。
1.基數(shù)排序 vs 計(jì)數(shù)排序 vs 桶排序
基數(shù)排序有兩種方法: 這三種排序算法都利用了桶的概念,但對(duì)桶的使用方法上有明顯差異:
●基數(shù)排序:根據(jù)鍵值的每位數(shù)字來(lái)分配桶;
●計(jì)數(shù)排序:每個(gè)桶只存儲(chǔ)單一鍵值;
●桶排序:每個(gè)桶存儲(chǔ)一定范圍的數(shù)值。
2.Python 代碼
def RadixSort(list):
i = 0 #初始為個(gè)位排序
n = 1 #最小的位數(shù)置為1(包含0)
max_num = max(list) #得到帶排序數(shù)組中最大數(shù)
while max_num > 10**n: #得到最大數(shù)是幾位數(shù)
n += 1
while i < n:
bucket = {} #用字典構(gòu)建桶
for x in range(10):
bucket.setdefault(x, []) #將每個(gè)桶置空
for x in list: #對(duì)每一位進(jìn)行排序
radix =int((x / (10**i)) % 10) #得到每位的基數(shù)
bucket[radix].append(x) #將對(duì)應(yīng)的數(shù)
組元素加入到相 #應(yīng)位基數(shù)的桶中
j = 0
for k in range(10):
if len(bucket[k]) != 0: #若桶不為空
for y in bucket[k]: #將該桶中每個(gè)元素
list[j] = y #放回到數(shù)組中
j += 1
i += 1
return list















 京公網(wǎng)安備 11010802030320號(hào)
京公網(wǎng)安備 11010802030320號(hào)